 U.S Manufacturing
U.S ManufacturingGSL Series Zero-Backlash Strain Wave (harmonic) Gearboxes
GAM’s GSL series zero-backlash strain wave (harmonic) gearboxes provide zero-backlash and high torque in a small, lightweight gearbox. Collaborate with GAM engineers to customize the GSL series robotic strain wave gear reducers for easy integration into machines and mechanisms.
Features
- Drops in for popular competitor gearboxes
- Strain wave (harmonic) gearing for high precision
- Backlash ≤ 0.5 arcmin (≤ 30 arcsec)
- High reduction ratios in a single stage: 50:1 to 160:1
- Simple design for integration into a mechanism or machine
- High torque density with low inertia
- Wide selection of models and configurations
- Collaborate with GAM engineers to design a strain wave gearbox assembly for easy integration
Get CAD Models & Tech Specs with our Online Product Catalog
search our catalog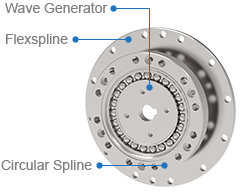
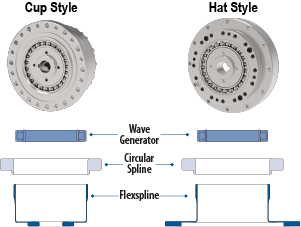
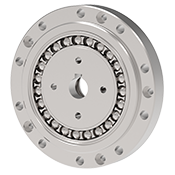
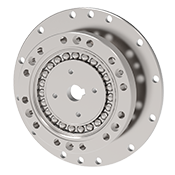
Cup vs. Hat Style
The terms "Cup" and "Hat" refer to the shape of the Flexspline. When viewed in cross-section, the flexspline looks like a cup or a hat.
Cup Style
Mounting flange output (bottom of the cup) is easy to bolt to for components such as pinions
Hat Style
The flexspline is outermost diameter. Useful for applications requiring a gearbox with a rotating housing such as an AGV wheel or robot joint
Rotation Direction
The GSL strain wave gearbox can be driven in two ways:
Common Operation
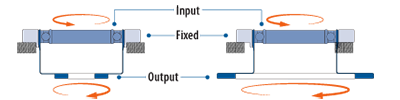
| Input | Wave Generator |
| Output | Flexspline |
| Fixed | Circular Spline |
| Rotation | Opposite Direction |
| Ratio | Nominal Ratio, e.g. 50:1 |
Alternate Operation
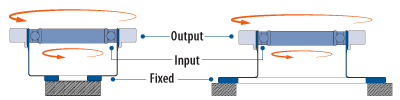
| Input | Wave Generator |
| Output | Circular Spline |
| Fixed | Flexspline |
| Rotation | Same Direction |
| Ratio | Nominal Ratio + 1, e.g. 51:1 |
GSL Series Models
GSL-CS-A & GSL-CS-B
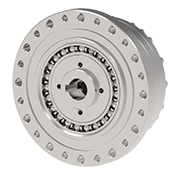
Cup Style Flexspline, Standard Input
- Cup-style Flexspline with keyed input
- Oldham's coupling input available (-B) to compensate for misalignment
- Sizes 014 to 032
- Nominal Torque 7.9 to 248 Nm
- Technical specs and CAD models
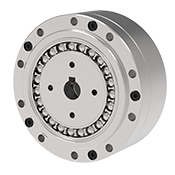
GSL-HS-A & GSL-HS-B

Hat Style Flexspline, Standard Input
- Hat-style Flexspline with standard bore input
- Oldham's coupling input available (-B) to compensate for misalignment
- Sizes 014 to 032
- Nominal Torque 7.8 to 248 Nm
- Technical specs and CAD models
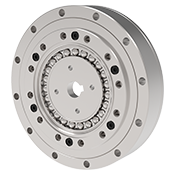
GSL-HS-C

Hat Style Flexspline, Hollow Input
- Hat-style Flexspline with hollow input
- Sizes 014 to 040
- Nominal Torque 7.9 to 432 Nm
- Technical specs and CAD models
GSL-HS-D

Hat Style Flexspline, Shaft Input
- Hat-style Flexspline with shaft input
- Sizes 014 to 032
- Nominal Torque 7.9 to 248 Nm
- Technical specs and CAD models
GSL-HS-E

Basic Hat Style with Hollow Input
- Hat-style Flexspline, Hollow Bore
- Sizes 014 to 032
- Nominal Torque 7.9 to 248 Nm
- Technical specs and CAD models
Compact / Ultra Thin Gearboxes
GSL-CT-A
Cup Style Flexspline, Compact Design
- Cup-Style Flexspline with lower profile and smaller diamter than GSL-CS gearbox
- Sizes 014 and 017
- Nominal Torque 4.8 to 27 Nm
- Technical specs and CAD models
GSL-HT-A
Hat Style Flexspline, Ultra thin
- Ha-style flexspline with ulta thin design
- Sizes 014 and 017
- Nominal Torque 4.8 to 18 Nm
- Technical specs and CAD models
GSLC Components
The component form of the strain wave gearboxes includes only the Wave Generator, Flexspline, Circular Spline. For easy, full integration into your mechanism or machine.
GSLC-C
Cup Style Flexspline
- Components with Cup-Style Flexspline
- Sizes 014 to 032
- Nominal Torque 7.9 to 248 Nm
- Technical specs
GSLC-HS
- Components with Hat-Style Flexspline
- Sizes 014 to 032
- Nominal Torque 7.9 to 248 Nm
- Technical specs
Collaborate with GAM
We have the ability to customize & modify all our products. Our team of engineers will collaborate with you to produce your desired result.
PDF Resources
Related Products
GPL Robotic Planetary
Vibration-free, continuous coordinated motion with backlash less than 0.1 arcmin
Learn More
GCL Robotic Cycloidal
Precise point-to-point motion with impact resistance 5x nominal torque
Learn More
Rack and Pinion Systems
Precision helical rack & pinion, available alone or paired with GAM gearboxes for optimized linear solutions.
Learn MoreContact the GAM Team
Have questions? Our team of experts can help! Give us a call at 888-426-7117 or fill out the form below and one of our team members will be in touch shortly.
*Required fields